O sistema dispõe de uma Interface Gráfica (GUI) que se comunica com o núcleo da Lógica Central da Aplicação (S2C2) para gerenciar as funcionalidades.
Funções Chave de Configuraçãoe Gerenciamento:
- Base de Doutrina Militar: Componente externo responsável por definir as regras da doutrina militar do Exército Brasileiro. Isso determina as configurações e ações permitidas nos cenários (ex: hierarquia de comunicação, alcance de dispositivos, tipologia de agentes).
- Gerenciamento Semântico (OWL): Agrega as operações de uma linguagem semântica (OWL) para representar o conhecimento e as regras da doutrina militar. Converte dados doutrinários em parâmetros de simulação e gerencia modificações nos cenários.
- Gerenciamento de Parâmetros: Permite a listagem e personalização dos parâmetros da simulação (dentro das restrições do OWL), essenciais para definir o cenário. Inclui:
- Geografia: Mapa, Clima.
- Tropa: Organização Militar, Tipo de Plataforma, Posição Inicial.
- Comunicação: Alcance dos Dispositivos de Comunicação.
- Execução: Algoritmo de Busca de Caminhos, Tamanho do Lote.
Orquestrador de Co-simulação
A aplicação possui um orquestrador (EmuSim) que gerencia o funcionamento geral do sistema, atuando como ponte entre os eventos da aplicação e os motores de simulação externos, em formato de co-simulação.
| Motor de Simulação | Ferramenta | Papel na Co-simulação |
|---|---|---|
| Simulador MAS | NetLogo (Java/Scala) | Gerencia aspectos operacionais: número de agentes, objetivos, comportamentos e o ambiente. |
| Emulador de Redes | Mininet-WiFi (Python) | Provê os componentes de rede, executando aplicações de C2 reais e suportando a troca de dados entre os agentes. |
Sincronização e Isolamento
- Sincronização: O orquestrador foi construído com interfaces para comunicação com o NetLogo e Mininet-WiFi, garantindo o loop sincronizado da co-simulação.
- Isolamento de Rede: Cada nó de tropa é executado como uma estação no Mininet-WiFi, utilizando namespaces do kernel Linux. Isso garante isolamento completo da pilha de rede e dos processos. Esta abordagem permite que o software C2 real seja executado em um ambiente virtualmente idêntico a um hardware dedicado, mas com maior leveza e controle do que contêineres Docker.
Mapas e Granularidade
A validade da simulação depende da representação fidedigna do ambiente operacional.
- Criação de Mapas: A modelagem utiliza arquivos topográficos reais, pré-processados para interpretação pelo NetLogo com rótulos padrão (Ex: terreno intransponível, campo aberto).
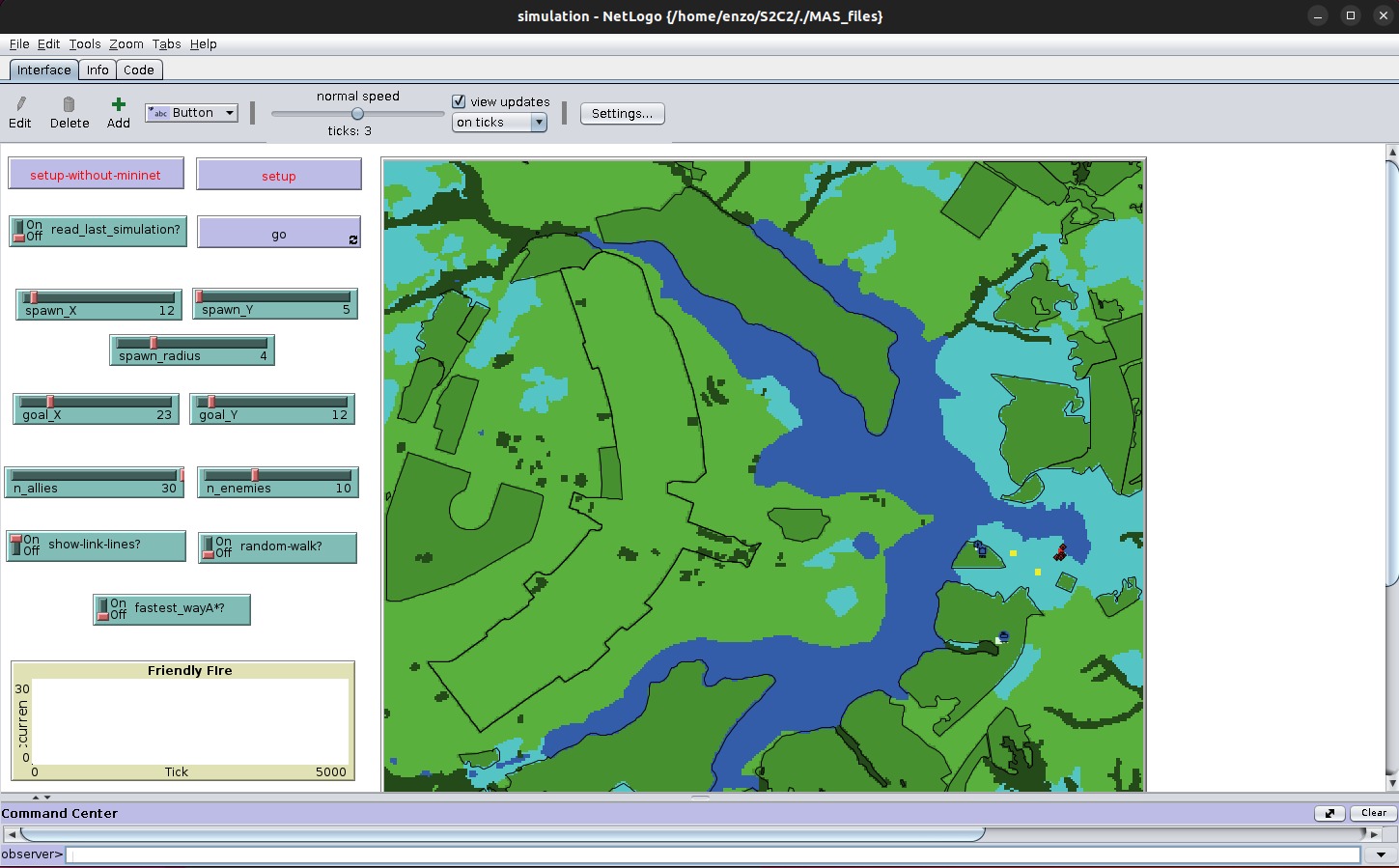
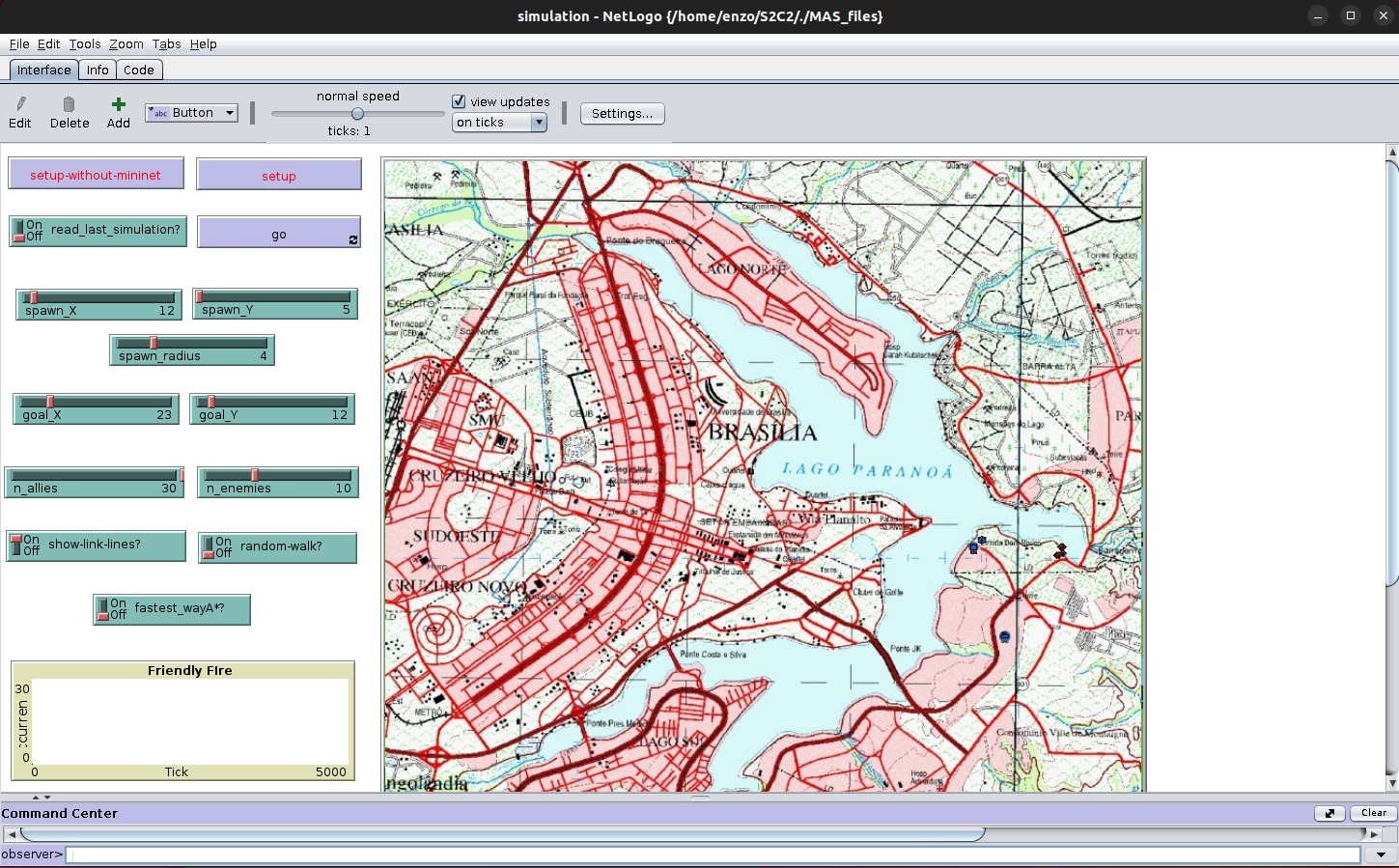
- Modos de Visualização: O sistema suporta dois modos:
- Mapa de Simulação (Padrão): Agentes interagem diretamente com o grid de patches e suas propriedades topográficas (afetando movimento, visão e comunicação).
- Visualização sobre Imagem (PNG): A simulação ocorre sobre uma imagem estática (ex: satélite), abstraindo a interação detalhada com a topografia.
- Granularidade: Para otimizar o desempenho em mapas grandes, o sistema permite ajustar a granularidade do grid do cenário de simulação (tamanho do patch). Isso é essencial para evitar que patches muito pequenos elevem excessivamente o custo computacional do algoritmo de busca de caminhos (A*).
|
|
|
|
|
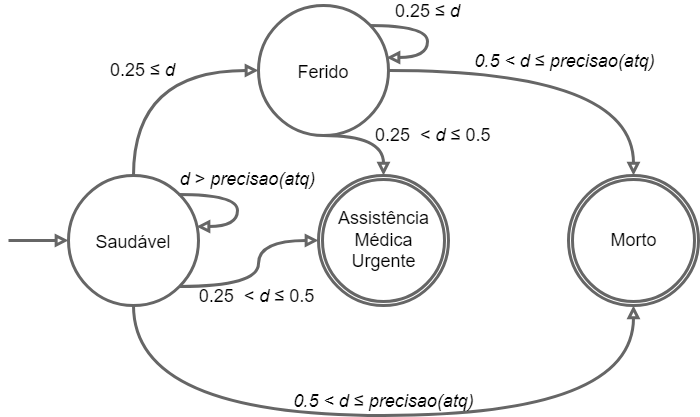
Modelagem dos Agentes
A cor de cada agente reflete seu estado durante o loop de simulação, sendo definido por uma Máquina de Estados Finitos (FSM).
| Estado (Aliado/Inimigo) | Propósito |
|---|---|
| Saudável (Azul/Vermelho) | Estado Inicial. |
| Ferido (Roxo/Rosa) | Mobilidade reduzida após um acerto. |
| Assistência Médica Urgente (Amarelo/Laranja) | Estado final que exige evacuação (protegido pela Convenção de Genebra). |
| Morto (Cinza/Preto) | Estado final. |
Agentes mudam de estado com base na probabilidade de acerto (influenciada pelo alcance da arma e distância do alvo). Acertos em áreas de menor letalidade têm maior probabilidade, enquanto acertos em áreas mais letais têm menor probabilidade, mas causam transições mais graves. A comunicação e o reconhecimento visual são essenciais, pois falhas nesses fatores podem levar a incidentes de fogo amigo.